
搜索结果: 1-15 共查到“控制科学与技术 S模式”相关记录44条 . 查询时间(0.531 秒)
内蒙古大学电子信息工程学院校级教学模式改革试点课程
内蒙古大学电子信息工程学院 校级 教学模式 改革试点课程
2023/2/26
内蒙古大学电子信息工程学院校级教学模式改革试点课程:电路分析、信号与系统、微机原理与单片机接口技术、模拟电路、通信原理、自动控制原理

2022年1月22日,由中国图象图形学学会和中国自动化学会联合主办,中国自动化学会模式识别与机器智能(CAA-PRMI)专委会、中国图象图形学学会机器视觉(CSIG-MV)专委会、中山大学网络空间安全学院和中国图象图形学报学术公益直播平台“图图Seminar”联合承办的“模式识别与机器智能”系列论坛之“机器视觉与智能安全”成功举办。会议采用线上直播的形式举办,吸引了超过1万余人次参加。本次论坛邀请...

2021年11月3日上午,2020年度国家科学技术奖励大会在北京隆重召开。由中国科学院自动化研究所作为唯一完成单位的项目“视觉运动模式学习与理解的理论与方法”荣获2020年度国家自然科学奖二等奖。项目主要完成人为胡卫明研究员、刘成林研究员、李兵研究员、张笑钦教授、王恒博士。
基于自学习中枢模式发生器的仿人机器人适应性行走控制
仿人机器人 自学习中枢模式发生器 适应性行走 轨迹生成
2024/1/19
为了克服传统中枢模式发生器(Central pattern generator,CPG)关节空间控制方法的复杂性和局限性,本文基于自学习中枢模式发生器模型,提出了一套在线调制和融合多传感器信息的仿人机器人环境自适应行走控制方法.算法难点在于如何在机器人的工作空间将自学习CPG用于工作空间轨迹生成,并使CPG参数直接和步态模式相关联.本文提出了利用自学习CPG来学习和实时生成机器人质心轨迹和脚掌轨迹...
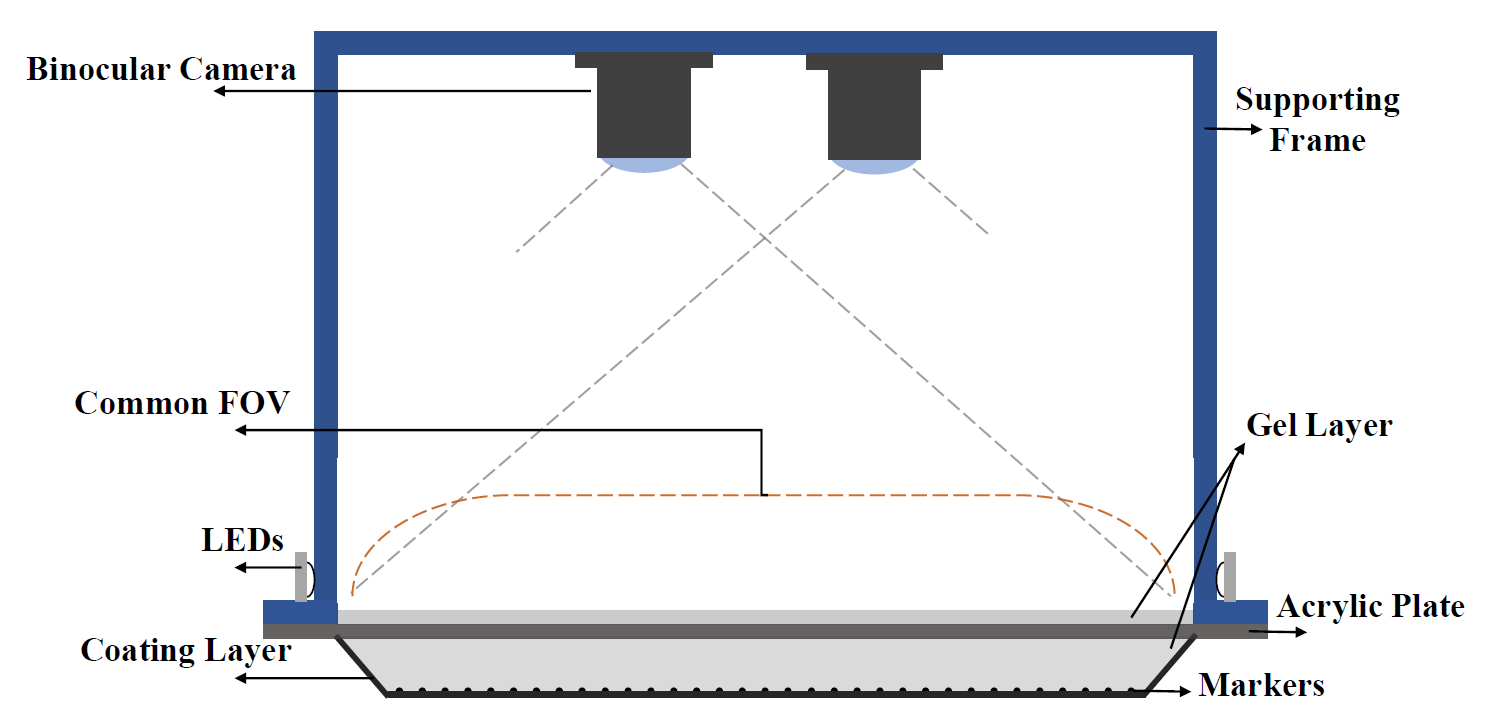
机器人多模态感知及灵巧操作是迈向下一代类人及通用机器人技术研究的关键内容,在工业生产、医疗康复及航天航空等领域具有广泛的应用前景。但在多模式视触觉感知方面,相比于视觉传感器及感知算法的飞速进展,触觉传感技术发展缓慢,进一步迟滞着机器人多模态感知及接触-丰富操作任务中的操作技能学习。

随着无人驾驶在很多领域的出现,状态估计与感知作为自主系统最重要的技术之一,比以往任何时候都显得尤为重要。2021年5月26日,美国特拉华大学黄国权博士,受中科院自动化所机器视觉组组长吴毅红研究员邀请,为所内师生做了关于“面向自动驾驶的视觉惯导融合状态估计与感知”的报告。

聚智赋能,创新模式,引领全国职教教学团队建设――北京工业职业技术学院机电工程学院在教育部新闻发布会中分享国家级教师教学团队建设经验(图)
教育部 新闻发布会 国家级教师教学 团队建设经验 机电一体化技术
2021/4/7
2021年1月27日上午10点,教育部2021年首场新闻发布会在京召开,介绍新时代高校教师队伍改革建设情况。发布会由教育部新闻发言人续梅主持,我校党委书记高喜军作为122个首批国家级职业教育教师教学创新团队的唯一代表,与教育部教师工作司司长任友群、人力资源与社会保障部专业技术人员管理局副局长刘冬梅、中国教育科学研究院副院长于发友共同出席发布会,并现场分享了我校机电一体化技术专业教学创新团队建设经验...
医学模式面临第四次革命(图)
国民健康 现代医学模式 科学范式 革命
2022/3/11
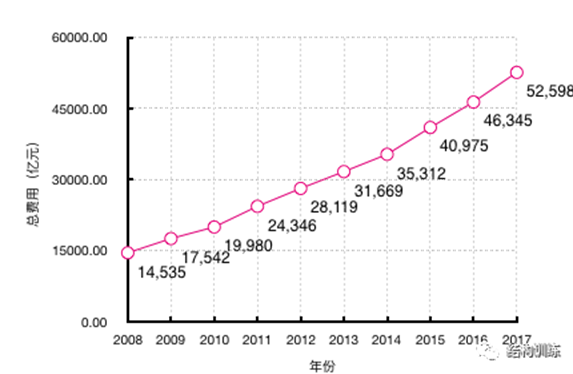
自2008年以来,我国已经连续投入了超过30万亿的卫生总费用,然而,每年就诊人数却直线上升,仅2017年的就诊人数就上升到81亿人次,慢性非传染病疾病出现大幅度迅速地攀升深层次原因归根到底还是医学模式需要一次新的革命。从国家统计局网站上获得最新数据来看,我国国民健康的水平令人堪忧。自2008年到2017年,我国每年卫生总费用的情况(见图1),2008年的年度总费用不到1.5万亿,经过10年的时间,...
The 24th International Conference on Pattern Recognition (ICPR 2018), sponsored by the International Association for Pattern Recognition (IAPR), will take place at the China National Convention Center...
第五届人工智能与模式识别国际会议(The Fifth International Conference on Artificial Intelligence and Pattern Recognition )
第五届 人工智能 模式识别 国际会议
2017/11/27
You are invited to participate in The Fifth International Conference on Artificial Intelligence and Pattern Recognition (AIPR2018) that will be held in Lodz, Poland, on September 17-19, 2018 . The eve...
基于多模式弹性驱动器的膝关节外骨骼机械腿
弹性驱动器 多模式运动 膝关节外骨骼 运动状态机
2017/11/30
基于人体行走过程中下肢肌肉的运动机理,提出一种多模式弹性驱动器,并应用于膝关节外骨骼中实现膝关节外骨骼机械腿的刚性驱动及柔性驱动.首先,对多模式弹性驱动器及膝关节外骨骼进行机构设计,并分析驱动器运动模式.其后,进行驱动器的动力学建模,并分析弹性参数、阻尼参数及负载对驱动器输出带宽的影响,针对弹性驱动器特征进行了基于运动状态机的控制策略研究.最后,根据控制策略对膝关节外骨骼样机实施运动控制.实验结果...
第6届模式识别应用和方法国际会议(International Conference on Pattern Recognition Applications and Methods)
模式识别应用和方法 国际会议
2017/2/14
The International Conference on Pattern Recognition Applications and Methods would like to become a major point of contact between researchers, engineers and practitioners on the areas of Pattern Reco...
从机械结构、运动模式和控制系统3 大部分入手详细介绍机器鱼的设计 制作过程。对影响机器鱼游动的重要参数进行水下试验,利用Matlab 对得到的数据离散化处理,进行曲线拟合,分 析不同控制参数对同一款机器鱼的影响。实验结果表明:该设计新型机器鱼可实现9 种运动模式,并能顺利切换原 设计的多种游动模式。