搜索结果: 1-15 共查到“知识要闻 基础力学”相关记录350条 . 查询时间(5.469 秒)
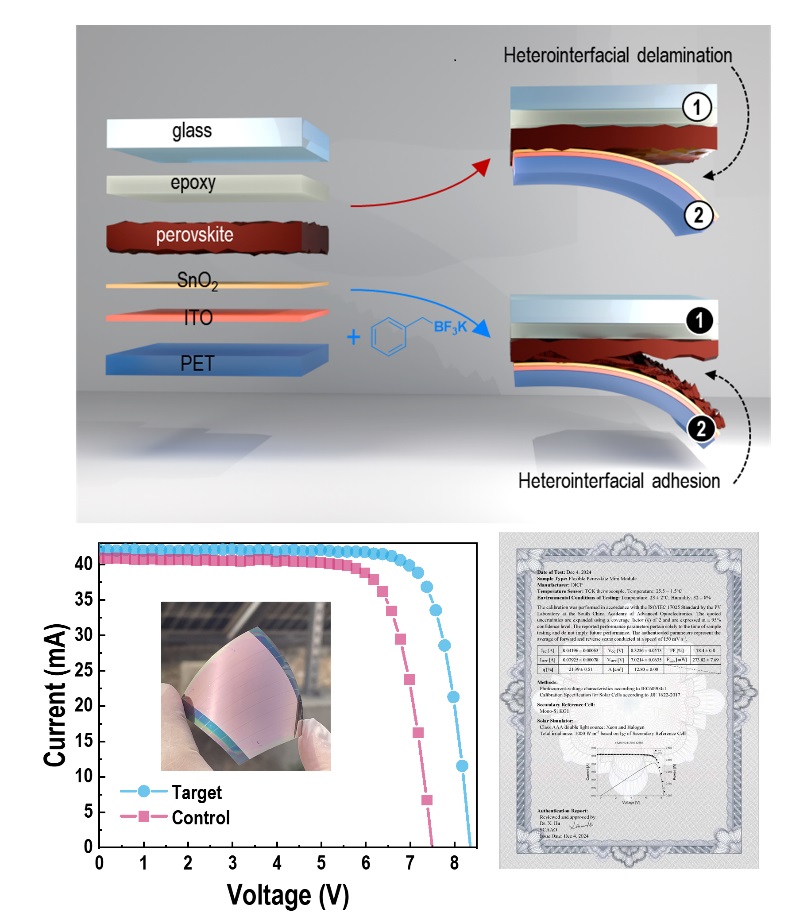
2025年2月20日,中国科学院大连化学物理研究所太阳能研究部薄膜太阳能电池研究组(DNL1606组)杨栋研究员和刘生忠研究员团队,在运用双面连接器解决柔性大面积钙钛矿太阳能电池中异质界面分层问题的研究中取得新进展。

中国科学院沈阳自动化所水下仿生游动机器人研究取得进展(图)
仿生 机器人 柔性
2025/3/4
2025年2月17日,中国科学院沈阳自动化研究所机器人学研究室微纳米课题组设计开发了一款基于仿生肌肉驱动与嵌入式柔性感知的软体机器鱼,相关成果发表于机器人领域1区Top期刊IEEE Transactions on Robotics(T-RO)。

中国科学院兰州化物所静态摩擦性能标准计算模型获重要进展(图)
摩擦 性能标准 模型
2025/2/22
计算摩擦学作为探索与调控摩擦行为的新兴途径,为深入理解该领域开辟了新的视野。然而,若使用不精确的计算模型,所得结论或许无法为摩擦学发展增添助力,甚至可能增加对摩擦现象基础物理机制理解的困惑。为更加准确地描绘摩擦现象的全貌,深入探索其物理本质,亟需建立一套科学、标准的静态摩擦性能计算模型。

中国科学院力学所在高速飞行器表面烧蚀与振动对边界层转捩影响机理的研究中取得进展(图)
飞行器 机理 摩擦
2025/2/26
高速飞行器的气动设计涉及一系列基础空气动力学问题,是当前航空航天工程面临的重大挑战。在边界层从层流转变为湍流的过程中,飞行器表面的摩擦阻力和热流往往会骤然增大数倍,因此准确预测转捩发生的位置对于评估飞行器的气动性能至关重要。然而,由于影响转捩的因素众多,如在大气层中长时间巡航导致的表面烧蚀和壁面振动现象,并且这些因素的机理复杂,准确预测转捩位置变得极为困难。
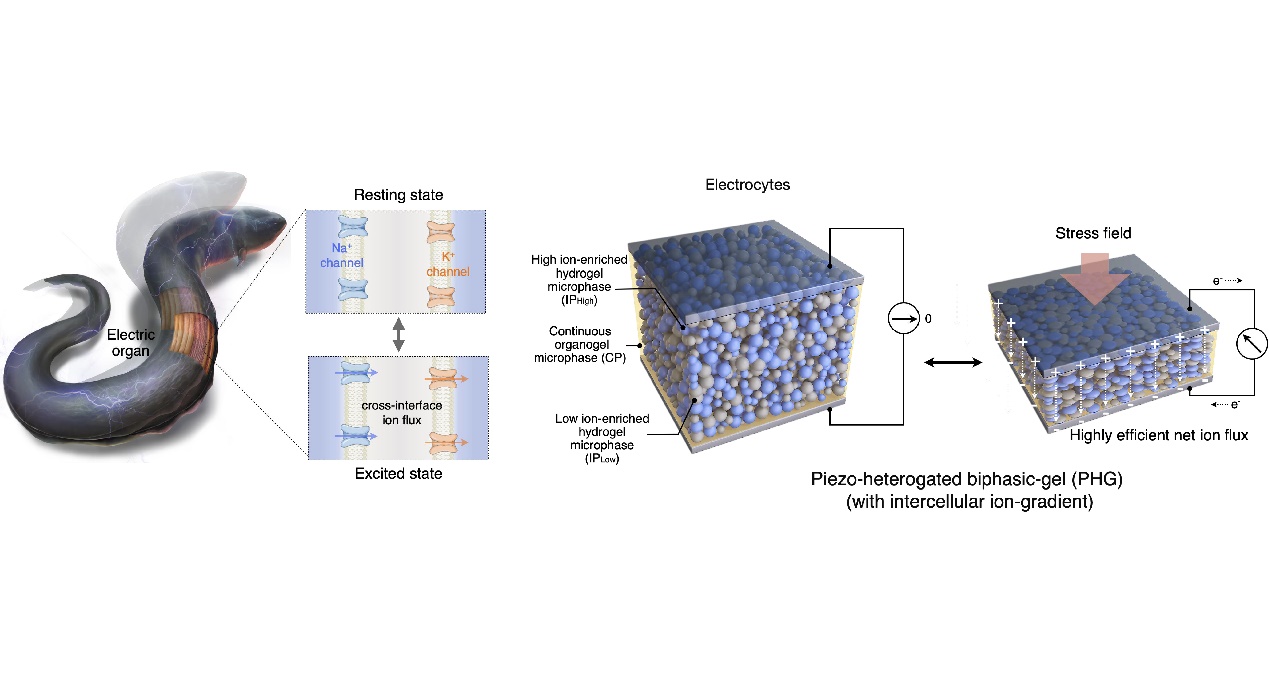
中国科学院理化所开发具有内盐差梯度的两相异质界面材料实现高效压电能量转换(图)
界面 材料 柔性
2025/1/9
离子基柔性压电材料能够响应外部机械刺激并产生离子电流,同时克服传统电子设备与生物组织之间的模量不匹配问题,从而实现与神经组织的复杂软交互。这种材料产生的压电能量具备高生物相容性,可作为柔性电源,广泛应用于生物传感器和可植入设备等领域。然而,现有压电材料中阳离子和阴离子在应力场下传输差异受到限制,从而降低了离子电能的转换效率。因此,大多数压电系统的功率密度较低,限制了其在能量转换和信号传输中的实际应...

国家自然科学基金委员会大连化物所杨维慎/彭媛团队在丙烯和丙烷膜分离技术研究方面取得进展(图)
杨维慎 彭媛 膜分离 柔性
2025/1/10
2024年12月13日,中国科学院大连化学物理研究所无机膜与催化新材料研究组(504组)杨维慎研究员和彭媛副研究员团队在丙烯和丙烷膜分离技术研究领域取得新进展。团队受自然界生物体表机械保护的形貌结构启发,创新性地设计制备了具有纵横交织结构的耐磨损MOF(即ZIF-67)膜材料,有效解决了骨架柔性孔笼“开门”效应、膜晶间缺陷限制膜精准筛分丙烯能力、多晶膜表面不耐磨损等问题,为丙烯和丙烷的高效分离膜材...
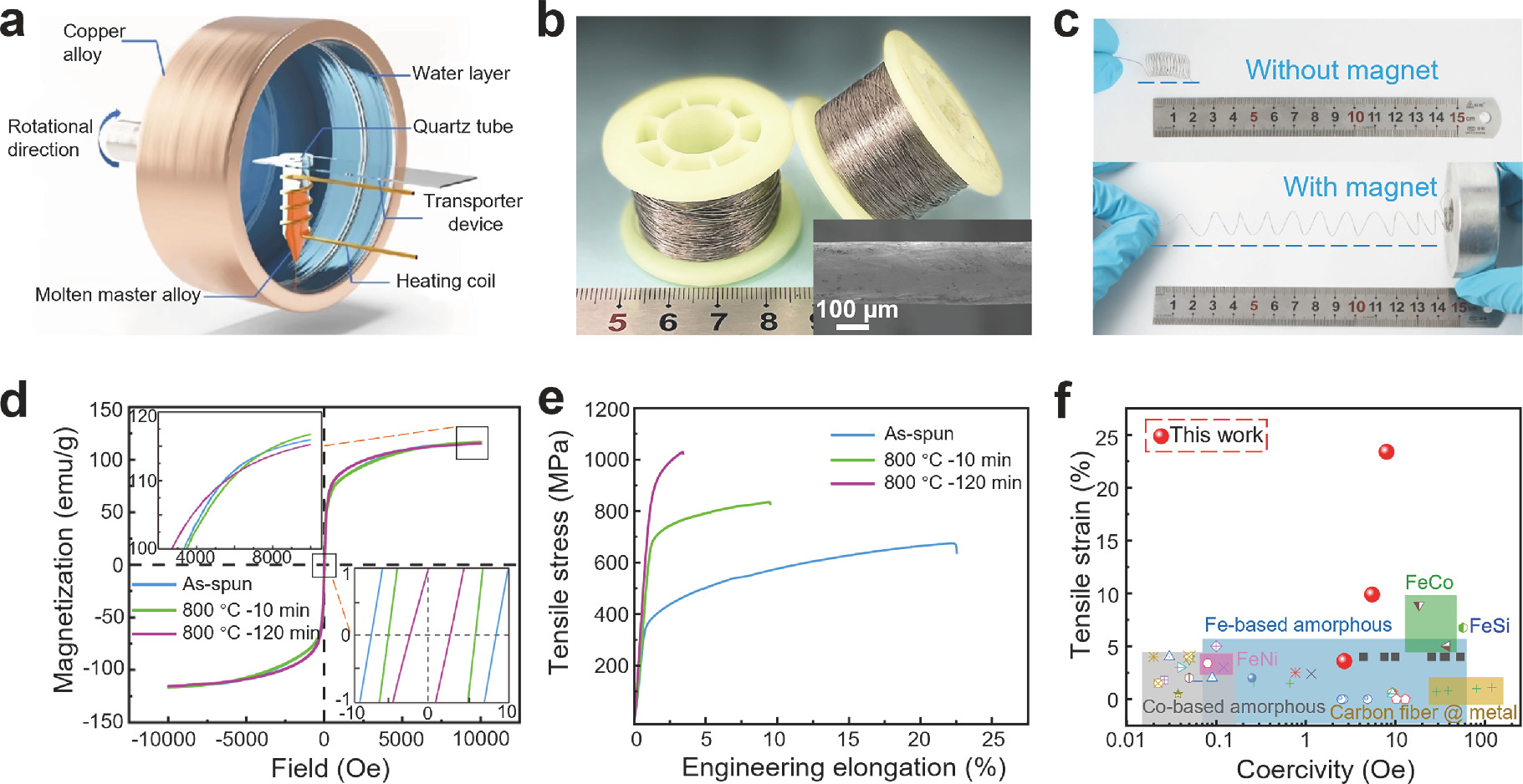
中国科学院宁波材料所在提高软磁合金纤维的塑性方面取得进展(图)
合金纤维 高性能 柔性 电子
2024/12/24
高性能软磁合金纤维在能量转换、传输和储存中发挥着至关重要的作用。传统的非晶合金纤维具有优异的软磁性能,但几乎没有拉伸塑性。高技术装备、多功能复合材料、柔性电子等领域在长期服役过程对能够承受拉伸、扭转和剪切载荷的高性能软磁纤维提出迫切需求。这些纤维不仅需要有优异的软磁性能,还要有微米尺度的直径、高的抗拉强度和塑性。高熵合金因其独特的成分和结构,有望突破软磁与力学性能相互制约的瓶颈。但现有的高熵合金纤...
中国科学院科学家利用新型皮革基微结构表面丝网印刷技术制备出阵列式电子皮肤(图)
结构 电子 柔性 传感器件
2024/12/8
2024年来,电子皮肤作为新兴的柔性传感器件,具有仿皮肤的结构和功能,在健康医疗、触觉反馈仿生电子、机器人等领域具有重要应用价值。电子皮肤在机器人触觉感知方面的作用尤为关键,搭建了人-机-物交互的桥梁,通过独特的触觉通道赋予机器人更丰富的感知能力,在提高人机交互的舒适性和安全性方面展现出潜力。为在复杂环境中准确感知并响应,电子皮肤应拥有超宽量程、高线性度、高一致性等特性。当前,普遍采用的技术路径是...
中国科学院新型寡聚受体设计策略助力提升有机太阳能电池光伏效率和稳定性(图)
有机 太阳能电池 柔性
2024/12/8
2024年12月5日,中国科学院青岛生物能源与过程研究所研究员包西昌带领的团队,在新型多臂寡聚受体研究中取得进展,开发了两类多臂寡聚受体3BY和3QY,并通过调节非稠合核心单元的刚柔度,实现了对外围功能臂的构型及聚集态调控,提高了有机太阳能电池的光伏效率和稳定性。

中国科大研究团队提出触觉感知新方法(图)
识别 机器 柔性
2024/12/4
中国科学技术大学工程科学学院、人形机器人研究院董二宝副教授课题组联合香港城市大学于欣格副教授团队,于2024年11月15日在国际著名期刊《国家科学评论》(National Science Review)上在线发表了题为“A tactile perception method with flexible grating structural color”的研究论文。该研究工作提出了一种基于柔性光栅结...
中国科大在纯红光OLED领域取得新进展(图)
有机 柔性 材料
2024/12/4
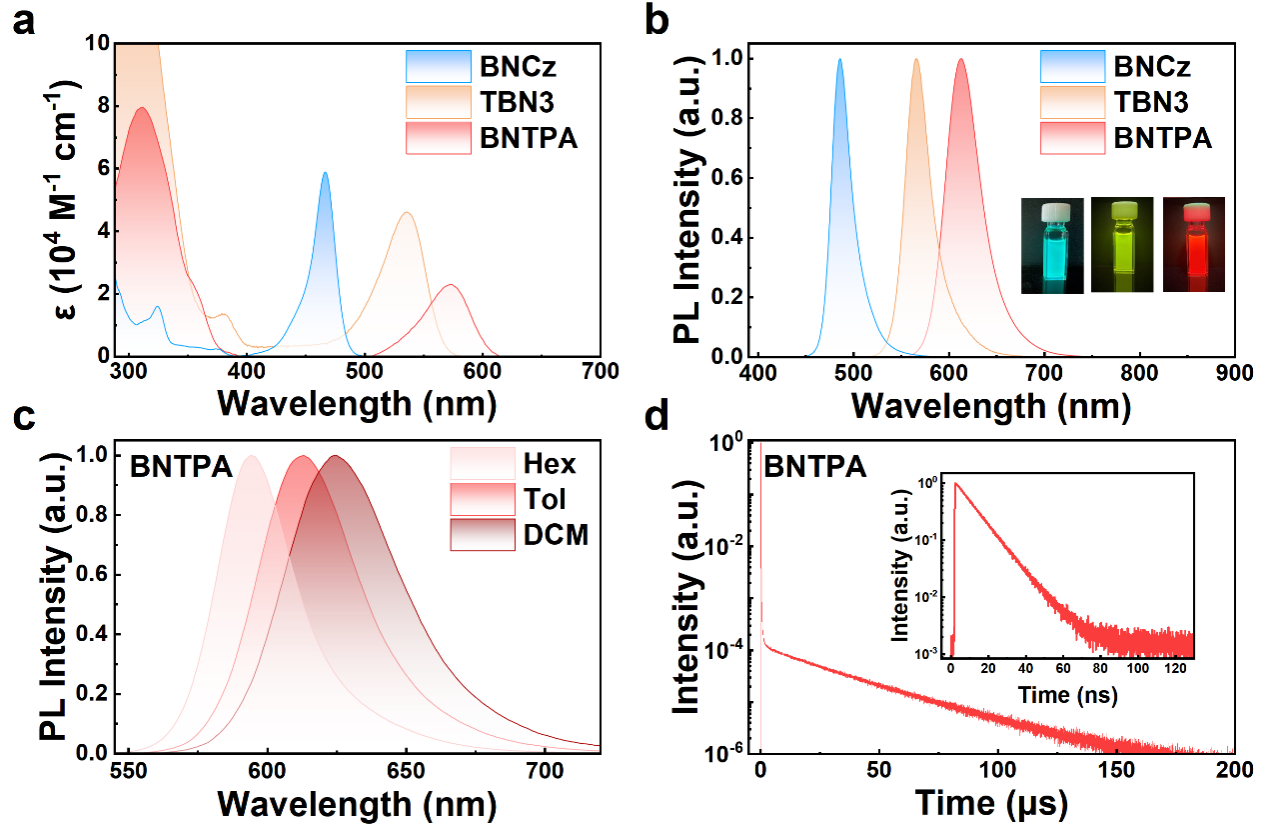
2024年11月21日,中国科学技术大学崔林松教授团队与周蒙教授团队以及北京信息科技大学柳渊教授团队合作,提出了纯红光OLED材料设计新策略,开发了色纯度接近NTSC红光标准的纯红光发光材料,在纯红光有机电致发光二极管(OLED)效率和稳定性方面实现新的突破。相关研究成果以“Efficient and Stable Narrowband Pure-Red Light-Emitting Diodes...

2024年11月1日-4日,第十六届全国摩擦学大会暨全国青年摩擦学学术会议在四川成都召开。本届会议由中国机械工程学会摩擦学分会主办,西南交通大学承办。大会以“摩擦学与新质生产力”为主题。会议邀请11位资深专家进行大会特邀报告和9位青年专家作青年摩擦学学术会议主旨报告,以及300余位学者针对基础件摩擦学、表面工程及摩擦学、材料摩擦磨损、特种工况摩擦学等9个专题进行了学术报告,展示了摩擦学最前沿的科技...

国家自然科学基金委员会哈工大张永兵团队在AI+扩散动力学研究方面取得进展(图)
张永兵 动力学 柔性 集成
2024/11/16
2024年10月29日,中国科学技术大学工程科学学院、人形机器人研究院李木军副教授、张世武教授,联合生命科学与医学部胡兵教授,提出了一种新型多孔磁性软体抓手(PMSG),通过在柔性磁性硅胶中融入多孔设计,使得PMSG能够迅速且安全地抓取脆弱的生物活体。成果以“Porous Magnetic Soft Grippers for Fast and Gentle Grasping of Delicate...

中国科学院南京地质古生物研究所古蝉形态空间和空气动力学分析揭示中生代的“飞行竞赛”(图)
空间 空气动力学 分析 飞行
2024/11/10
飞行是动物界极具创新性的运动方式,为飞行动物提供了诸多生存优势,极大地扩展了它们的生存空间和生态位。迄今,仅有昆虫、翼龙、鸟类和蝙蝠这四类动物演化出主动飞行能力。其中,昆虫是最早掌握飞行能力的动物,并且演化出了多样性极高的飞行策略和相应的生态适应。然而,重建灭绝昆虫的飞行能力非常困难,因此,我们对昆虫飞行能力的演化历史了解非常有限。