
�������: 1-15 ���鵽������������ ϵͳ����ؼ�¼113�� . ��ѯʱ��(2.097 ��)
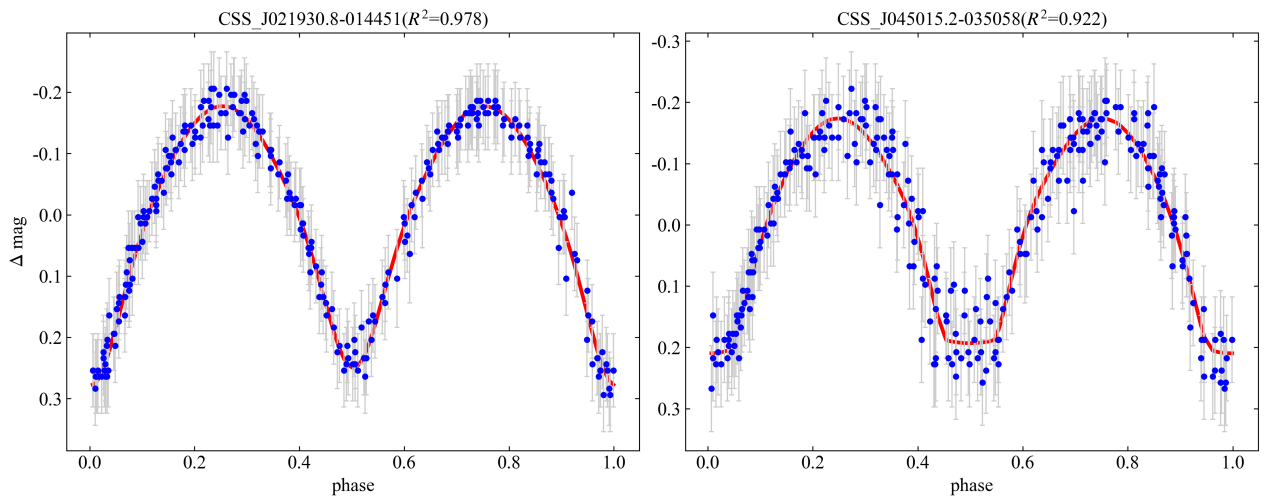
2024��10��23�գ��й���ѧԺ��������̨������������ͨѶ���ߣ��ͼ����������û���ѧϰ������ϱ�Ҷ˹�ƶϣ���չ��һ�ֿ�����������Ѳ���е����˫��ϵͳ������߲����ķ��������о��ɹ����ڹ�������ѧ�ڿ�����������ѧ����������The Astrophysical Journal Supplement Series�������߷�����

ransformer�ܹ��Լ���ע�����������������˴�ģ�����ܣ���ȴ�����������г��ȵĶ��η����㸴�Ӷȡ��������Ը��Ӷ�ģ�ͣ�������Transformer��LinFormer����״̬�ռ�ģ�ͣ�SSM��������RNN��LinRNN���ȣ��������Ϊ��ע�����ĸ�Ч������ڱ������У�������������ʽ��ͳһ��Ŀǰ���е�����ģ�ͣ����ܽ��������ص㡣���ţ��������������ע������Ƶ�������Ҫ��������̬������������̬�ƽ���...

2024������ͼ�����磨GNN�������ೡ���еõ��㷺Ӧ�ã����罻����������Ƽ�ϵͳ���Զ���ʻ�ȡ�Ȼ������ʵ�������Ӵ����������ͼ�ṹ�����IJ�����ϡ���ԣ�Ϊͼ������ĵ�ʱ�ӡ�����ЧӦ�ô����˾����ս���������ͼ���ݹ�ģ�ı�ըʽ���������ͼ�������г����ģ�����������ķô漰����������Խ�����С�
�й���ѧԺ�����Ƚ������о�Ժר������������ϵͳ�����Ʊ�������Ӧ��
�й���ѧԺ�����Ƚ������о�Ժ ר�� ������ ��ϵͳ
2023/9/26
�й���ѧԺ�����Ƚ������о�Ժר������������ϵͳ�����Ʊ�������Ӧ��
�й���ѧԺ������ѧ���ܻ�е�о���ר����һ�ֻ���ǻ��Ƶ��IJ��й�ѧ������ϵͳ��ʶ��
�й���ѧԺ������ѧ���ܻ�е�о��� ר�� ǻ��Ƶ�� ���й�ѧ ������ϵͳ ʶ��
2023/7/28
�й���ѧԺ������ѧ���ܻ�е�о���ר����һ�ֻ���ǻ��Ƶ��IJ��й�ѧ������ϵͳ��ʶ��
Ϊ����ʹ�ú����ƽ���(�������ģ��ϵͳ),�����˫�����ŷ�ϵͳ��˲̬��Ӧ����̬����,��Ժ��ⲿ�Ŷ���˫�����ŷ�ϵͳ,���һ�ֻ���Ԥ�����ܺ���(Prescribed performance function,PPF)�������״̬�������Ʋ���.����,���һ�ָĽ��Ĵ�����������������Լ���̬����Ԥ�����ܺ���,�����ú���������������ʹ�������ŷ��ĸ���������Ԥ���ı߽�֮��.���,����Ԥ�����ܺ�...
�й���ѧԺ��ѧ�о���ר����һ����������ѧģ�͵ķֲ�ʽ����ѵ��������ϵͳ
�й���ѧԺ��ѧ�о��� ר�� ��������ѧģ�� �ֲ�ʽ����ѵ��
2023/3/21
�й���ѧԺ��ѧ�о���ר����һ����������ѧģ�͵ķֲ�ʽ����ѵ��������ϵͳ

2023��3��10�գ������Ƽ���ѧϵͳ����ѧԺ���ҽ��ڿ�����������ѧ�����ݴ�ѧ��ɼ����У�Լ�ʥ·��˹��ʢ�ٴ�ѧ��ؿ�����������״������һ�����ǿ��ѧϰ�ķ�����Ч�������ģ�͵Ļ�̬���о��ɹ��ԡ��������ǿ��ѧϰѰ������ģ�͵Ļ�̬����Searching for spin glass ground states through deep reinforcement learning��Ϊ����2��9����...
�й���ѧԺ��ѧ�о���ר����һ�ֻ���Java Map���˻���������ϵͳ������
�й���ѧԺ��ѧ�о��� ר�� Java Map �˻����� ����ϵͳ
2023/3/8
�й���ѧԺ��ѧ�о���ר����һ�ֻ���Java Map���˻���������ϵͳ������
�����ˢֱ���������ϵͳ���ʿ��عܹ�����ϴ�������������ȡЧ���������ʶ��ȷ�ʵ͵����⣬���һ�ֻ��ڶ�ά����������2D-CNN��two-dimensional convolution neural network������Ӧ������ȡ�Ĺ��ϼ�ⷽ���������˹���ȡ�����ĸ����Լ���ȷ���ԡ����������Ϊ���������źŽ���FFTԤ����������һά����ת��Ϊ������ʽ��Ϊ2D-CNN���������ݣ�Ȼ������Adam�Ż�...
һ��p�淶�ͷ�����ϵͳԤ����������ʱ��H�� ���ٿ���
p�淶�ͷ�����ϵͳ Ԥ������ ����ʱ�����ܺ��� H���ٿ��� ����������Ӧ����
2024/1/18
���һ������ⲿ�Ŷ��ķ��ϸ���p�淶�ͷ�����ϵͳ,��һ���µ�Ԥ�����ܿ���˼��Ļ�����,��ϼ��ݻ��ּ�����H�������ۼ�������Ӧ����,�����һ������Ӧ��Ԥ����������ʱ��H���ٿ���������Ʒ���.����ƵĿ������ܹ���֤ϵͳ�ĸ���������ʱ�����ܺ���Լ��,�������������ͣϢʱ����������ƽ����һ��Ԥ�ȸ�����������,���ܹ������ⲿ�Ŷ���ϵͳ��Ӱ��.�ر��,��ͣϢʱ����ϵͳ��ʼ״̬��.������������...
��Դ��в�ȷ�������Ŷ��ķ�����ϵͳ�������Ż�����,���һ�ֻ���������Ƕ���ѧϰ���Ʒ���.��һ�ೣ����Lyapunov����������ʽ,����������������ɵ�ij�ֶ�ϵͳ�ȶ��Ļ���������,���������ڽ�ԭ�������Ľ�Ϊ����Lyapunov�ȶ�������������ɵ�������,�Ӷ��ܹ������Ƚ���������ѧϰ����ʵ�ֿ������������Ż�.�����˸������ĵ�ЧĿ�꺯��,�����˶�ϵͳ����C����ı�ʶ����.������һ��δ֪������...

��ɫ�о�������ģ��������ij�ˮ�������ܼ��ϵͳ��
�IJ��õ�ʵʱ��⼼����ϵͳ���
�õ��� ���������� ʵʱ���� �ֲ�ʽ�ܹ�
2024/1/23
�IJ����������в����Ĵõ������Ӱ���Ʒ��������������Ч��.��ߴõ�����Զ����̶ȶ����IJ�������Ч�ʺ������ܿ�������Ҫ.��ͳ�õ��ⷽ������Ӧ���������õ������Լ������仯������,��������Ӧ�÷�Χ.���������ھ���������ķ����ڴõ�������õ��˹㷺Ӧ��,���з�����ǿ��ȷ�ȸߵ��ص�.�������IJ�����������,��ƥ���ȴ��ٶȿ���ص���������ͼ������,���ھ���������ķ�������ʵ��ʵʱ��⡣

�й���ѧԺ�������ϼ����빤���о����ڷ���ʹ������ϵͳ�о�����ȡ�ý�չ��ͼ��
����ʹ������ϵͳ δ�������� ���λ�����
2021/4/7
���ܻ������˻������Ի���δ�������˷�չ����Ҫ���ơ����λ����ˣ������Ǿ߱��˹������㷨���ܵ����λ����ˣ������������ճ����������ڸ���Э���ͻ��������ҿ�����Σ�����������������;�Ԯ�ȡ������˵ĸ�֪ϵͳ�ܹ�������ռ����ݣ���������绷���ı仯������ͬ����Ӧ�������������˵ķ���������������������Ҫ�ġ����У�ʹ����������һ����Ҫ�Ĵ�������������ʶ������������¶ȡ�ѹ���ȼ���������DZ��Σ�գ�������Ԥ���ź�...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...